Copyright 2019 Reflux Design
About Me
“””I am a freelancer in the fields of robotics, machine learning, NLP and computer vision. I have done research on control of surgical robotic arm and underactuated bipedal walking. I have used machine learning for information extraction from documents, tables, images and line diagrams; NLP problems; object detection; and to solve other similar problems. I have worked with large language models GPT-3, T5, BERT for multiple NLP tasks like text generation, summary generation, Q&A, query-document indexing. I have a zeal for problem solving, research, ML and robotics and want to utilize it to contribute to the world.”””History
- Utopia Global, Bengaluru, India
- - Information extraction from scanned documents with tables, line diagrams, forms etc.
- - Custom named entity recognition, tokenization, category matching in unstructured text.
- - Object detection, OCR, image processing, fuzzy matching, classification, python
- CSIR-CSIO, Chandigarh, India & IIEST, India
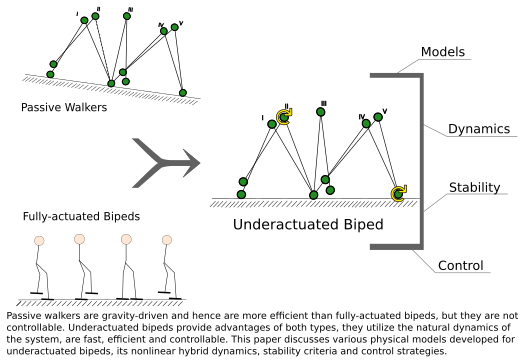
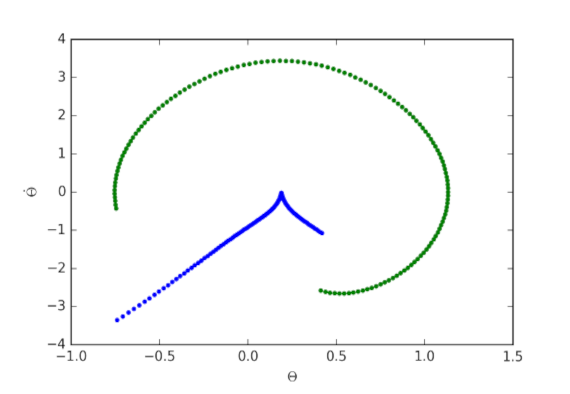
- - Control of underactuated bipedal robots to enable walking on steep slopes.
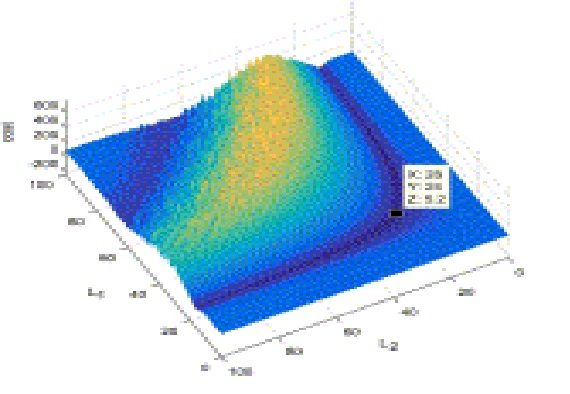
- - Design optimization of biped and robotic arm.
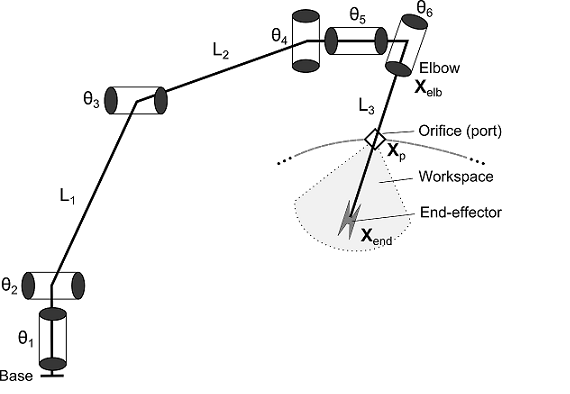
- - Control of robotic arm to perform minimally-invasive surgerical operations.
- - Kinematics, dynamics, control, optimization, metaheuristics, python, Matlab